Rasberry PI
This step describes how to attach the PI to your drone.
Flash the Pi SD Card
Download the sd card image from this link. Flash your sd card using the following commands (on linux).
sudo dd if=<path to image downloaded above> of=<path to sd card (ej. /dev/disk1)> bs=4M
Your card should now be flashed.
Mount the PI
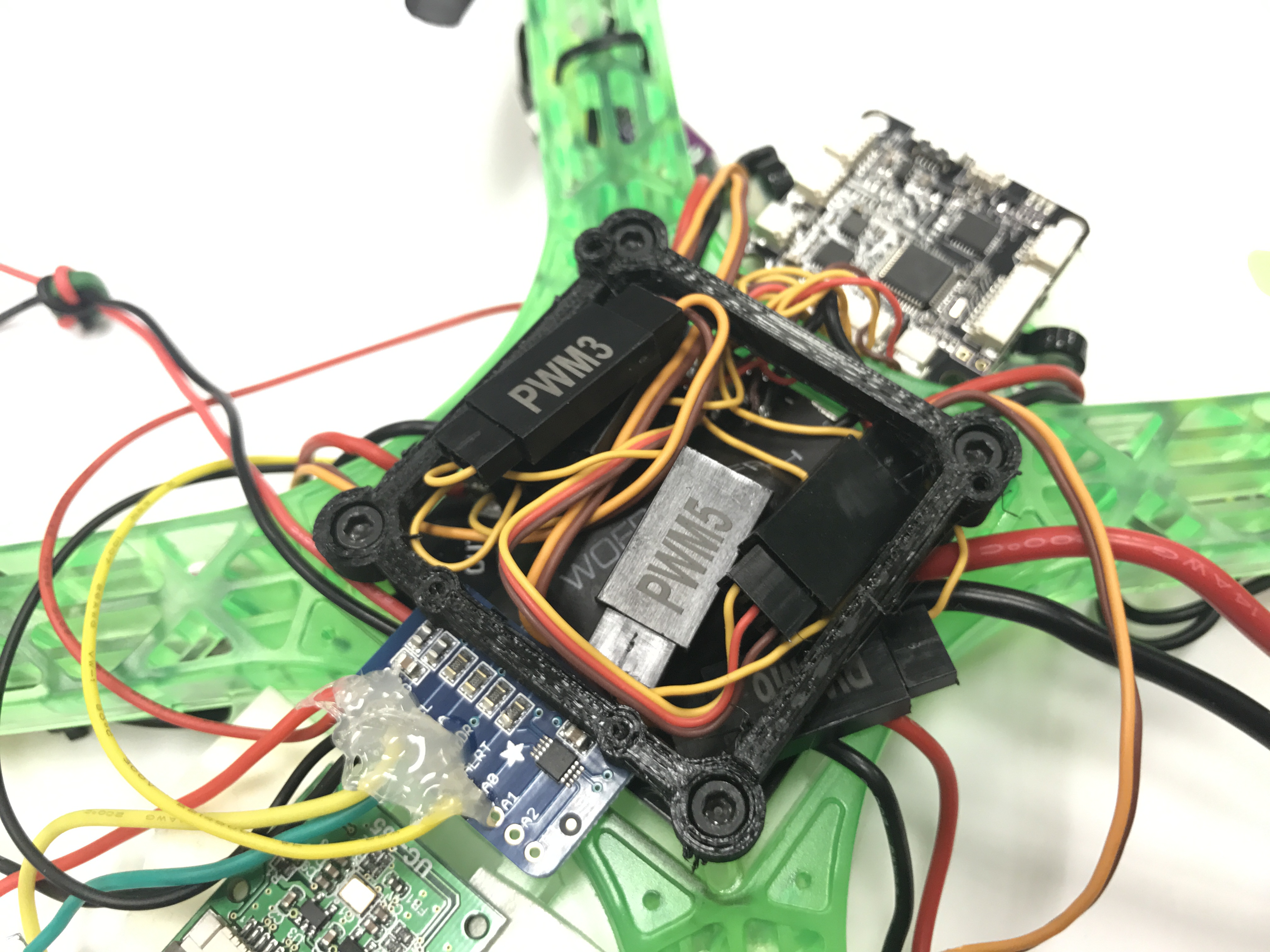
We designed and 3D printed a mount to attach the Rasberry Pi to the top of the drone.
In a previous section you mounted your ADC to the underside of this mount. Now we will use the short M3 bolts that were in the brass standoffs from a previous section to screw the pimount onto the standoffs.
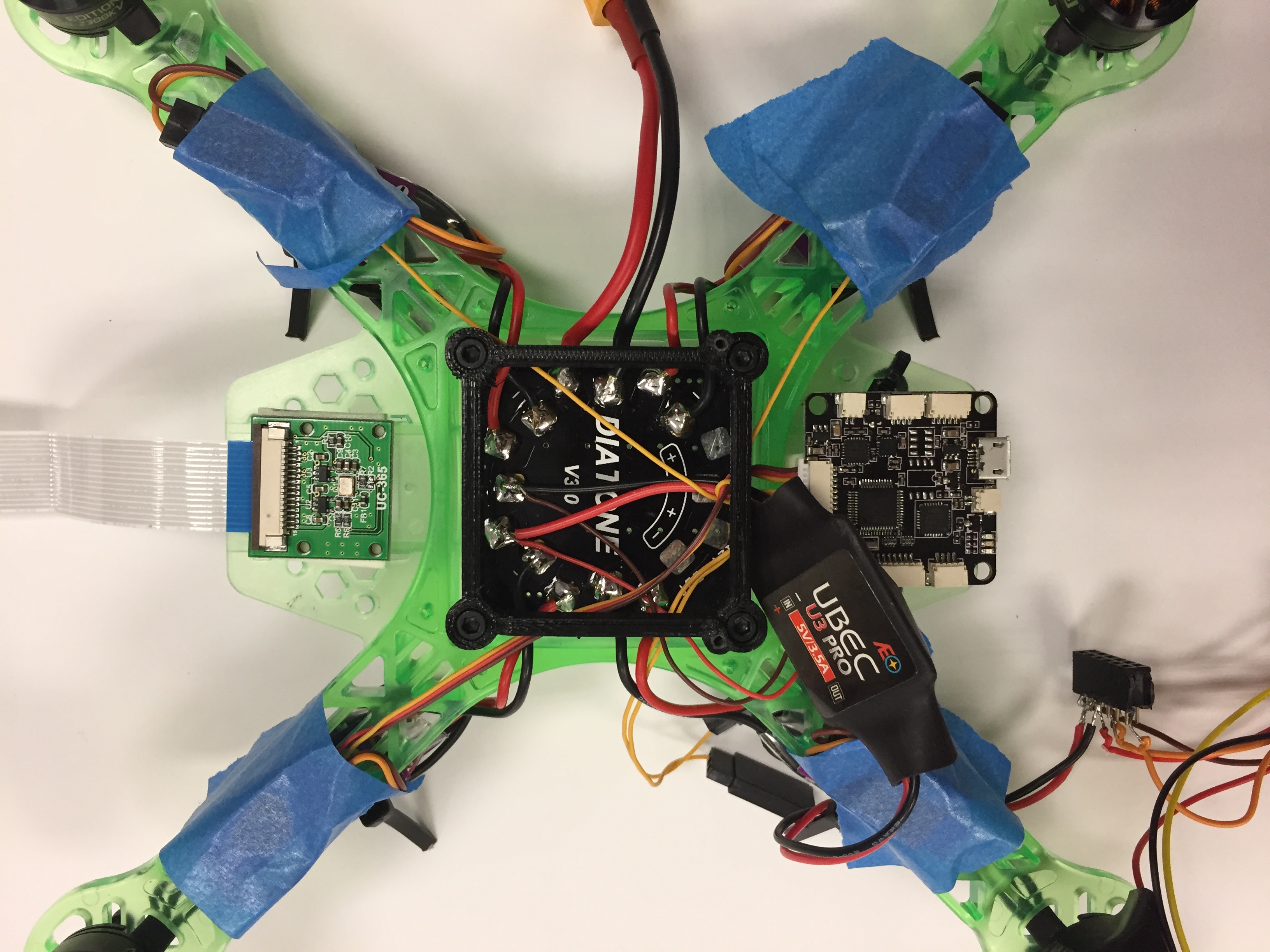
For wiring cleanliness, I like to hold the BEC on top of the PDB:
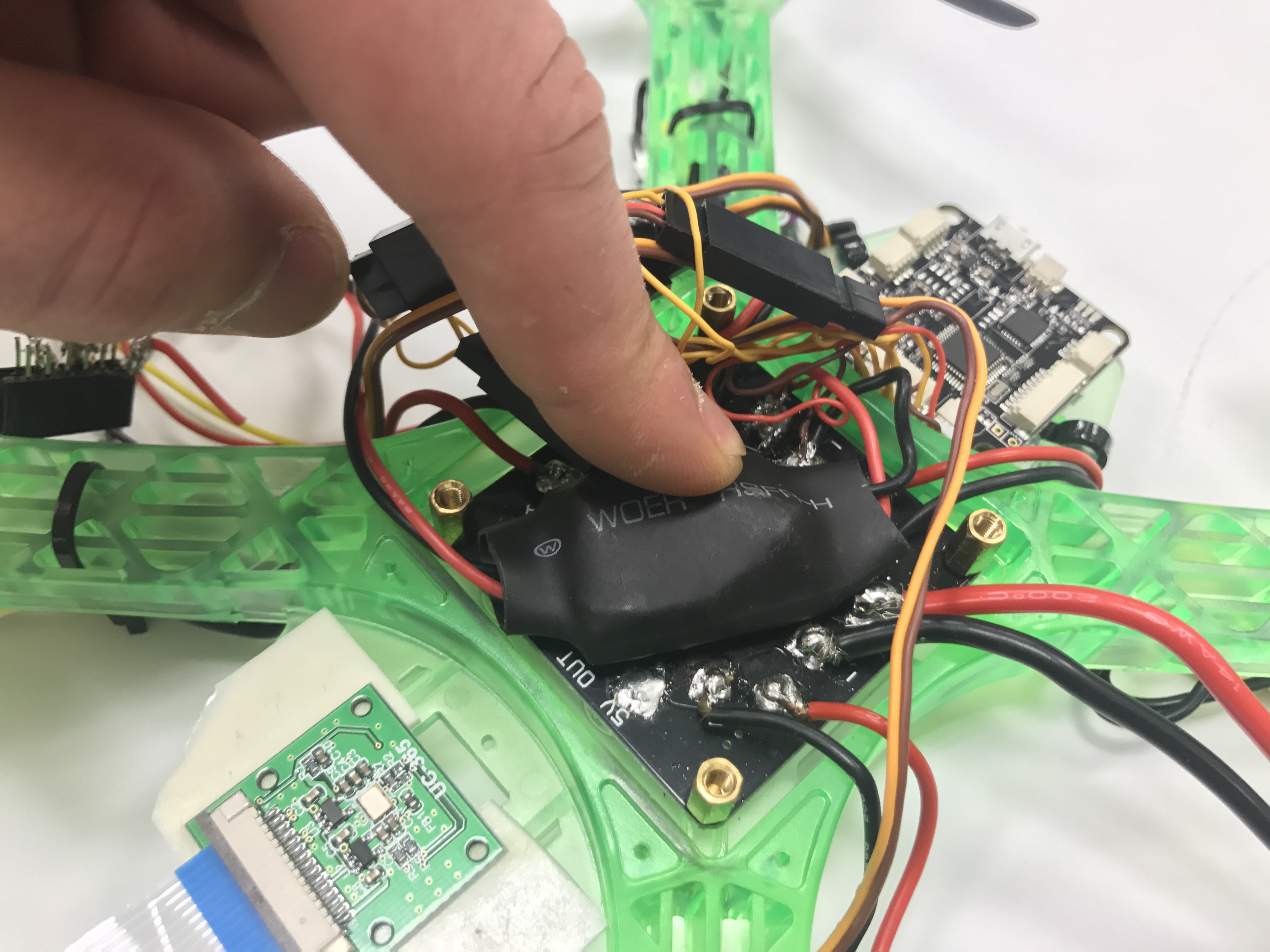
And fold the ESC signal connectors on top of the BEC
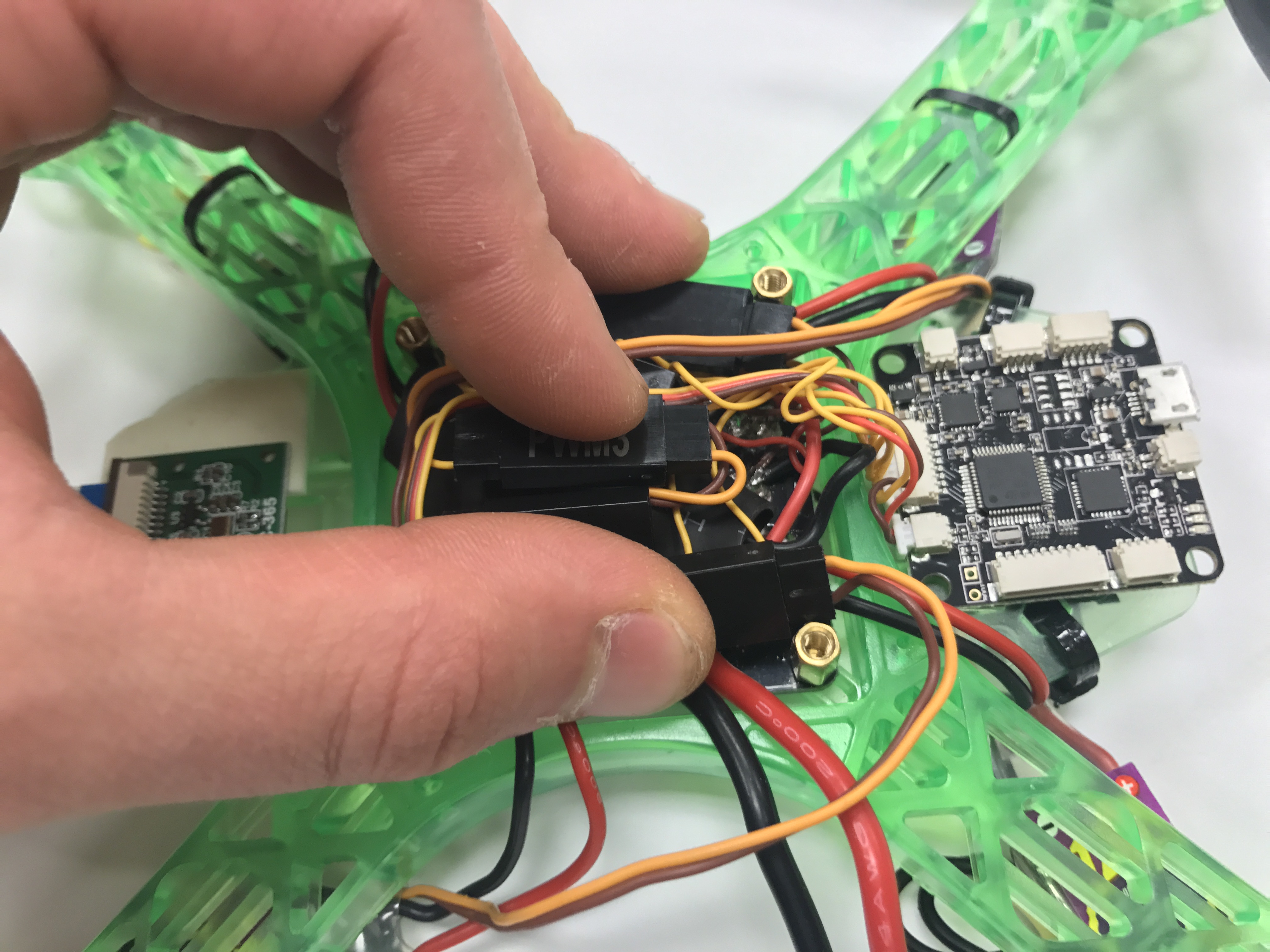
And finally use the short M3 bolts to screw the pimount onto the standoffs, holding the mess of wires in place. The ADC should be toward the back of the drone (the end with the camera), and the two small elevated holes should be towards the front of the drone.
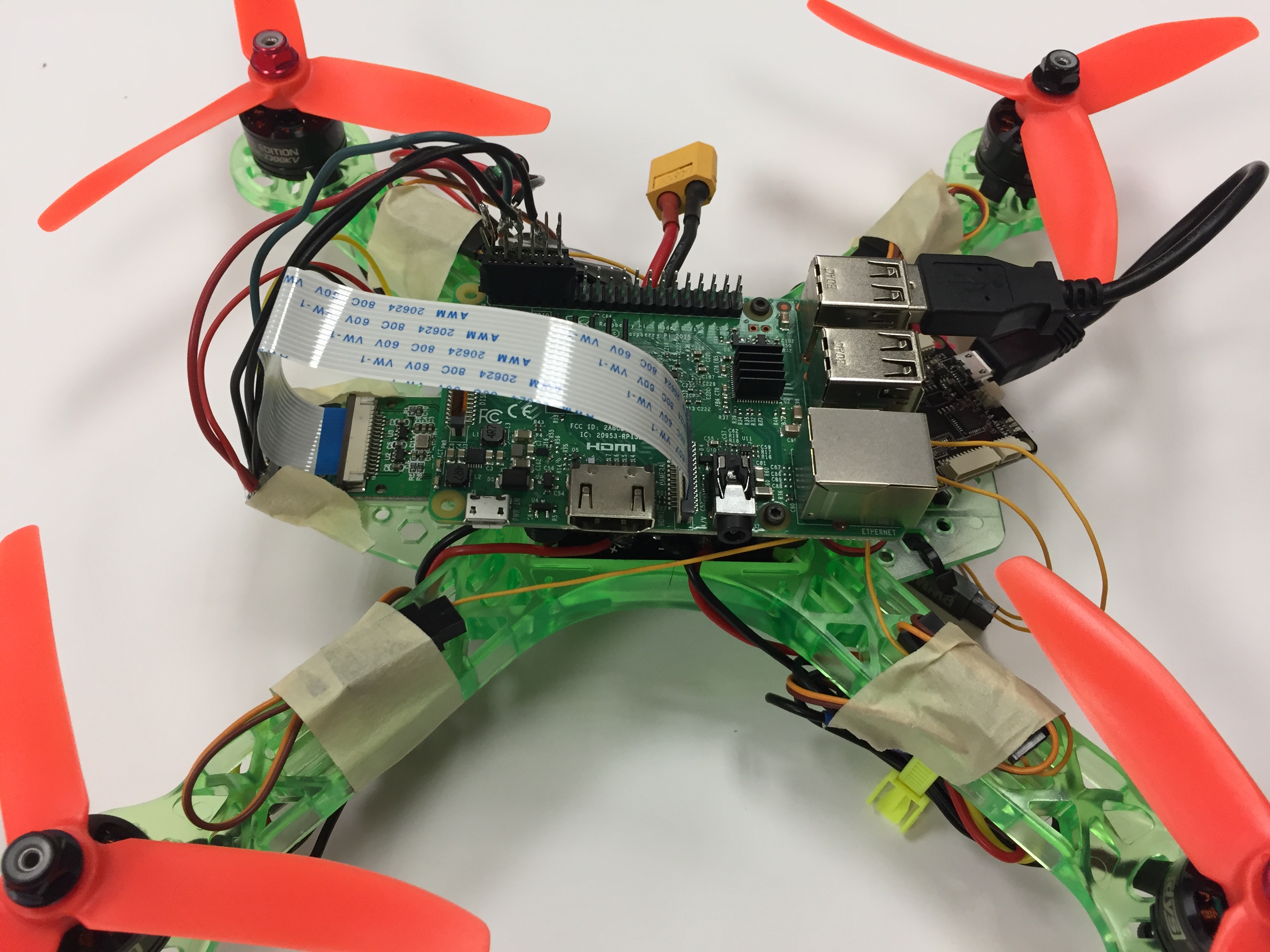
Use the long M1.6 bolts to mount the PI to the mount in the two elevated holes. The USB ports should be towards the front of the drone.
 Attach a pi mount.
Attach the pi to the mount.
Attach a pi mount.
Attach the pi to the mount.
Attach the heat sync
We have had problems with PIs burning out, so attach heat sinks to the CPU and network chips on the PI (the two biggest ICs). This will help disappate heat during high CPU load.
Add the Power and Ground to the Header
Solder the power and ground from the BEC to the header as shown. This provides power to the Rasberry PI.
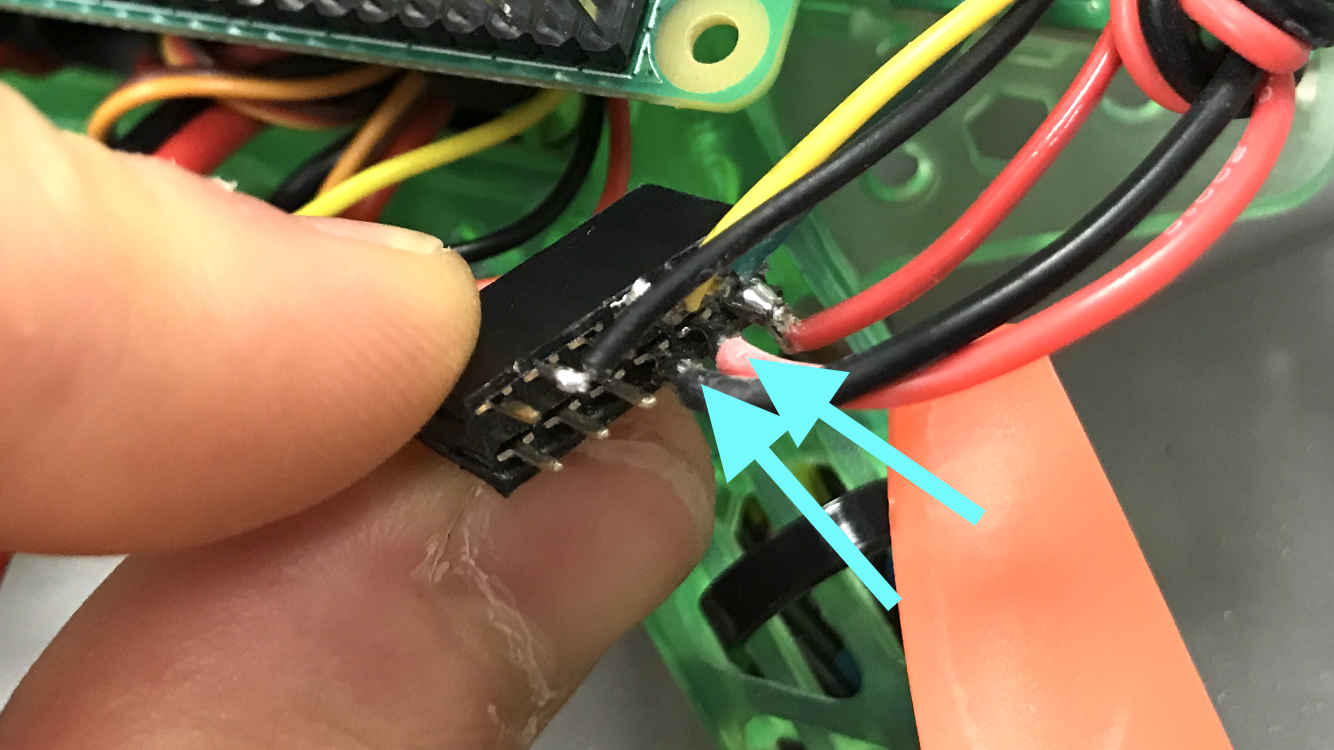
Plug the header into the PI GPIO pins. Triple check the orientation is correct, and that there are no shorts, because you can burn out the PI. To check the orientation, look at the data sheet for the Rasberry PI and make sure power and ground are connected to the correct GPIO pins.
Plug in the Camera
Carefully slide out the little tray on the connector.
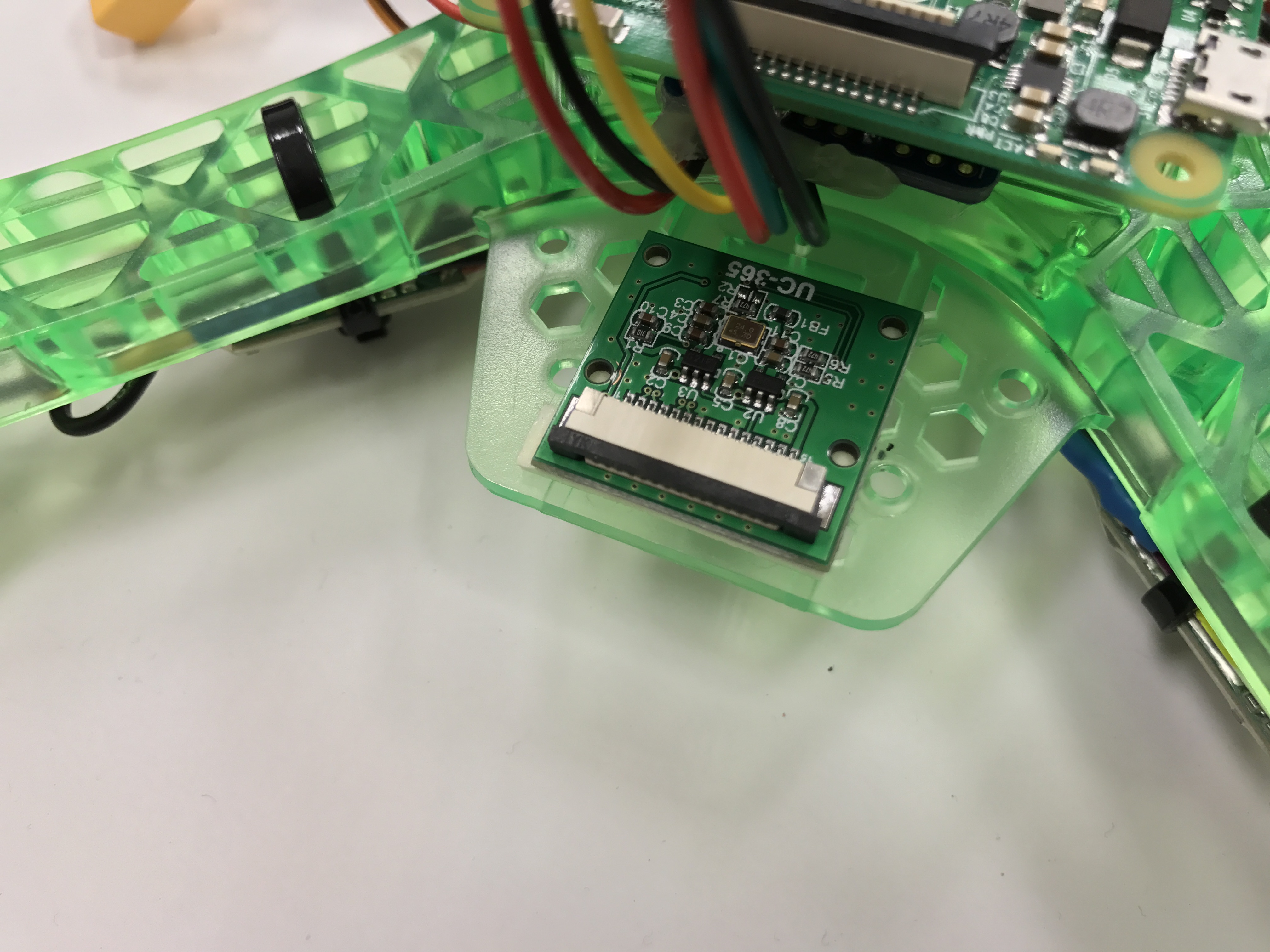
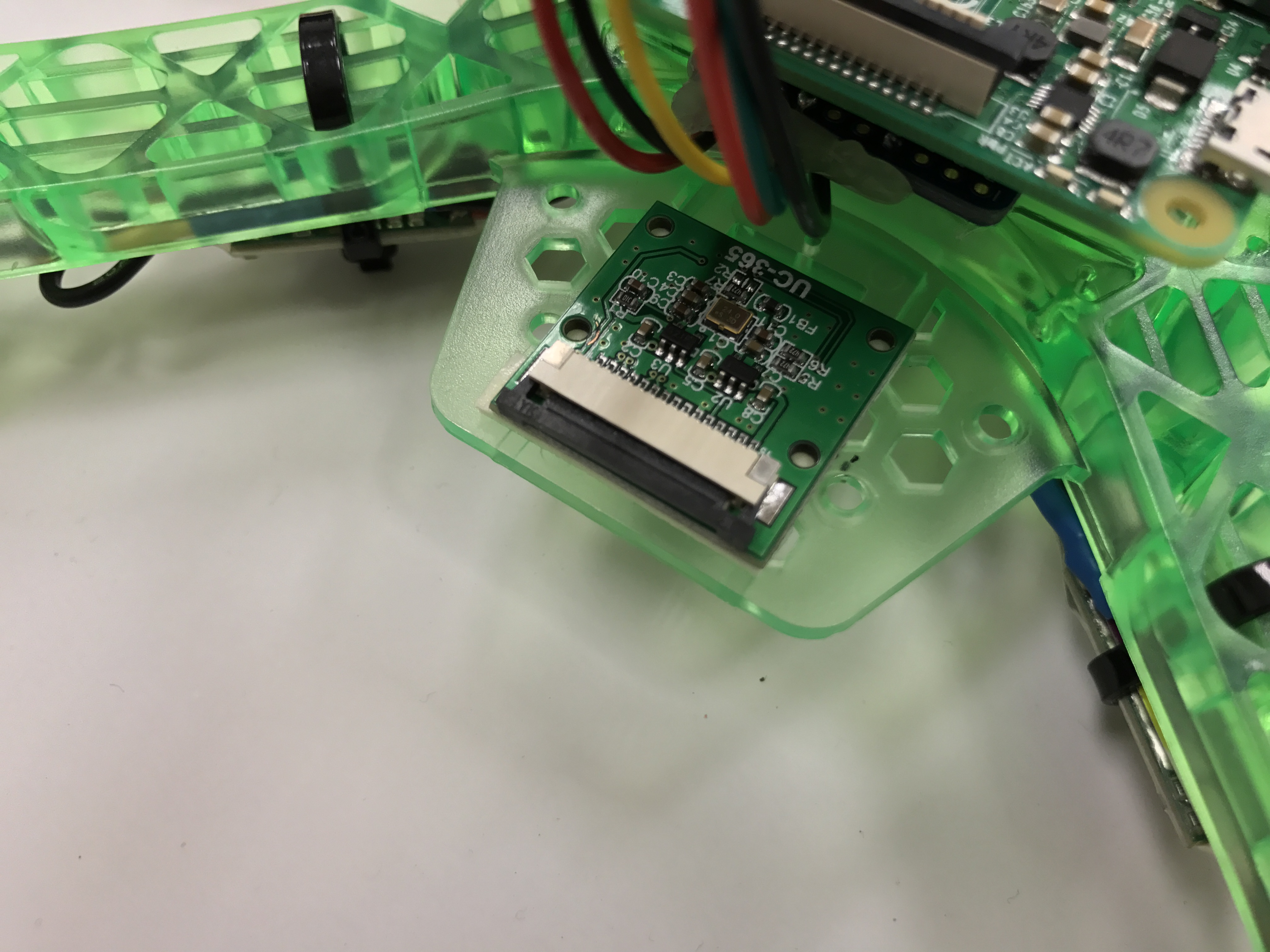
Insert the ribbon cable with the exposed pins facing down. Now push the little tray back, locking in the cable.
Do the same for the camera connector on the Pi (NOTE this is the one closer to the HDMI port)
Plug things in
Obtain an SD card and install it into the PI. We are providing pre-flashed SD cards with Rasbian, ROS, and other software preinstalled.
Plug the flight controller USB cable into the PI’s USB port.
Power on the Drone
After double checking the wiring is correct, plug in the battery to power on the drone! Verify that
- The red light on the PI turns on, and then the green flashing light.
- The red and blue light on the flight controller turns out.
- The green lights on the ESCs turn on.
- The LEDs on the power distribution board turn on.
If you see smoke coming from your drone, you probably have a short. Unplug it and inspect all solder joints for shorts.
Describe how you would debug each situation if the lights do not turn on.