Brown CS 148: Building Intelligent Robots
Final Project
Justin Basilico and Daniel Russo
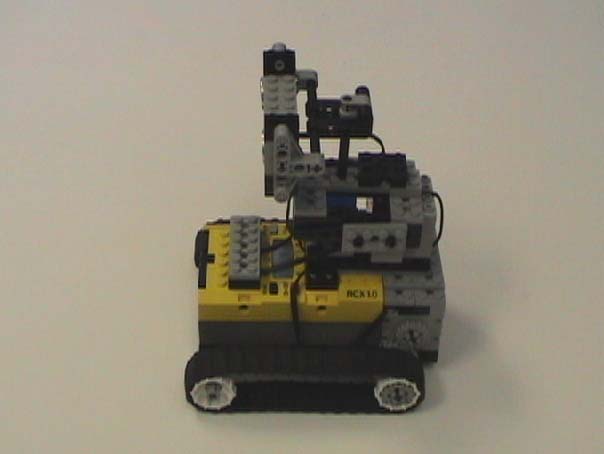
Sonar Patrol
In order for robots to operate in the real world, they must obey rules of polite society. One important rule is that the robot should not cause damage to its surroundings by colliding with objects in the environment. Our Sonar Patrol robot attempts to navigate through a typical environment consisting of hallways without bumping into the walls or other stationary or slow-moving objects it can detect. It accomplishes this by using a rotating sonar sensor that continually takes distance readings in all directions. Along with each sonar reading, the robot stores the direction the sonar is pointing, which is determined by a rotation sensor. The robot utilizes these readings in order to maintain a minimum distance from all objects so that it will not collide with them. In an environment such as a hallway where there are objects on either side of the robot, it will try and maintain an equal distance between them and thus stay in the center of the hallway without drifting too far to either side.