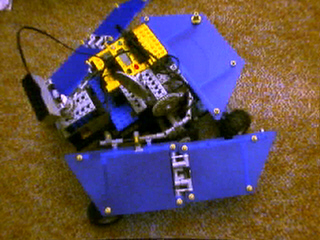
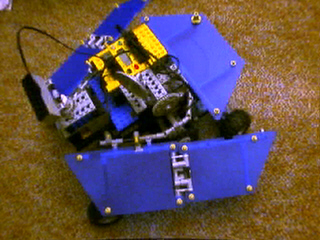
Mars Exploration Rover
We're making a near-replica of the Mars Exploration Rover. For basic
functionality, the robot will be able to traverse bumpy terrain with ease.
The wheel system will allow it to travel over tiny obstacles as well as
over small dips. The robot's intentions will be to pathfind in a
direction specified by IR signals. It will use a sonar sensor to find
obstacles larger than it can traverse over and avoid them. In the "wall"
scenario, the robot will turn around to its last traversal and try a
different safe path. Our robot will also have a mechanical arm to read
rock data from the terrain and record it. Data requests will be queried
by IR signals once again and the robot will feign the actions of sending
its information. The intricate motor turns can only be regulated by the
very necessary rotation sensors, and in order to fit all 4 motors onto
the brick, it is imperative that we combine the turning system with the
sonar sensor base.